小编语:在今年10月12日举办的英国隧道学会(bts)年会上,新兴隧道技术公司hypertunnel展示了他们的集群机器人快速施工隧道技术的实际设备和开挖试验结果。从之前的概念公布到此次的实物展出,这项技术距离实际的施工应用还有多远?本期小编就来带大家一起了解一下,这项备受关注的新技术到底进展如何!
hypertunnel是什么?
一直关注着隧道网的粉丝们对hypertunnel的集群机器人快速隧道施工技术一定不会陌生:该技术的核心是利用集群机器人在地层中先建好衬砌,然后再将衬砌内部的土体挖空,以形成隧道空间。

成型后的hypertunnel隧道(计算机模拟)
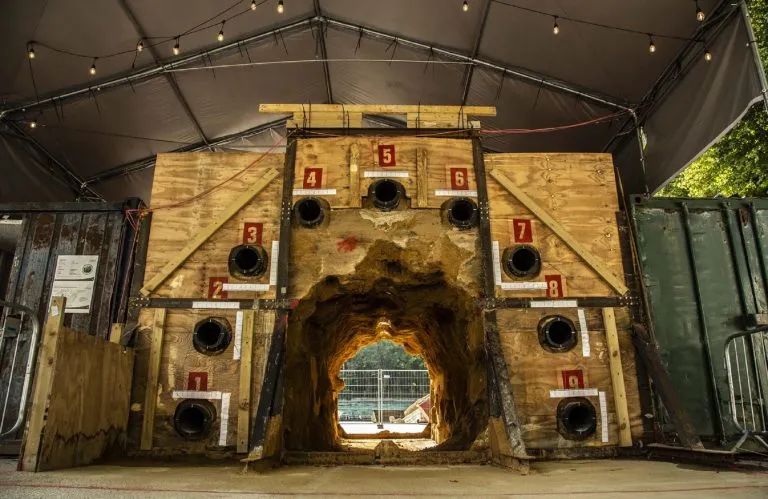
验证中的hypertunnel隧道
hypertunnel工法流程分为三步:
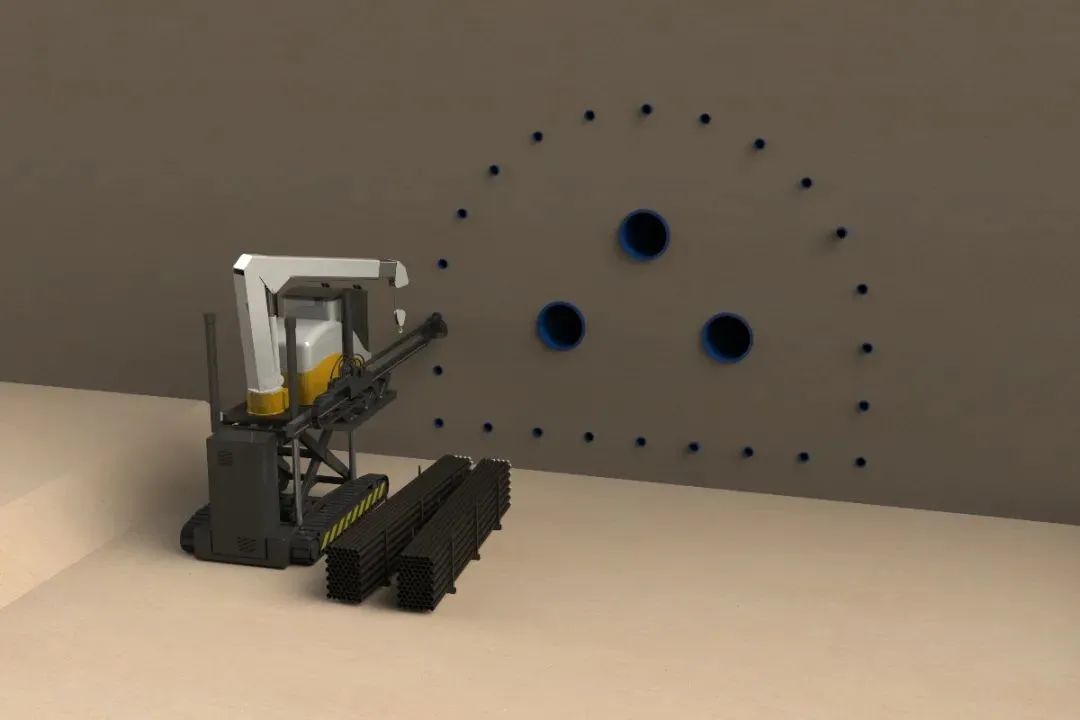
■ 第一步:建设施工导向管
利用水平定向钻机在隧道断面中心钻出数个原始导向管,进行初步勘探,并按照隧道断面的轮廓和隧道路线钻出一系列施工导向管。
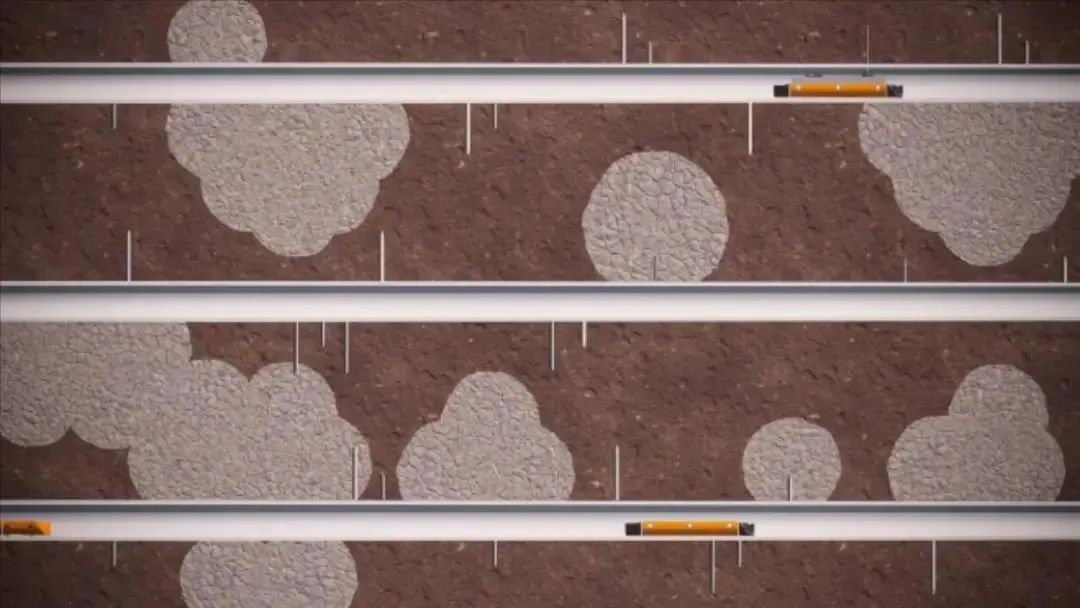
■ 第二步:机器人施工
大量机器人进入施工导向管,从施工导向管内通过微型钻头向周围的地层中钻孔并注入化学材料,固化后形成隧道衬砌。
■ 第三步:去除壳内土体
隧道衬砌成型后,将位于断面中心的原始导向管扩径,以促使壳内的土体向内“塌陷”,然后通过设备将弃土清除,后续按照隧道要求安装内衬。

点击下方链接,了解详细施工流程:
水平定向钻 集群机器人hypertunnel是否能改变隧道施工的未来?
hypertunnel的集群机器人快速隧道施工技术在去年的英国隧道学会年会上一经公布便饱受关注,但也有不少人对这一技术的可行性和成本效益提出了质疑。
时隔一年,在今年的国际隧协大会和10月12日举办的新一届英国隧道学会年会上,hypertunnel展示了施工机器人实物和试验性施工中的隧道。再一次引发了热议。

测试中的hypertunnel机器人
设想逐步变为实现
在本次英国隧道学会年会上,hypertunnel官方展示了一些施工机器人所需的关键技术:
■ 机器人并行穿越
想要高效建设一条隧道,需要数百甚至上千个机器人在隧道内的不同位置同时工作。为了确保上千台机器人准确抵达各自位置,同时互不干扰,hypertunnel给机器人设计了一种外部转向轮系统,在非作业时可以向另一侧转动,两台相向而行的机器人能够以“背靠背”的形式与对方“擦肩而过”,以此保证隧道内机器人的自由通行。该转向系统在本次会议上进行了实物展示。
转型系统和通行效果(计算机模拟)

外部转向轮系统和通行效果实物展示
■ 机器人内构施工设备
hypertunnel的机器人需要在施工导向管(外径初定为280mm)内完成钻孔,注浆,开挖,填充等作业流程,将这些施工设备集成在小小的机器人体内也是一个难题。针对这一问题,hypertunnel采用了一系列小型化技术,包括先进的蛇型机械臂技术等,也在大会上进行了展示:
自动化机械臂开挖效果(计算机模拟)
自动化机械臂实物展示
hypertunnel还展示了在施工导向管上进行钻孔,以及后续注浆等作业设备。
面对质疑
本次在大会上进行实物展示后,hypertunnel也受到了一些质疑:
■ 如何防水?
地下水是隧道工程中不可避免的问题,防水也是hypertunnel的机器人必须克服的挑战。这种机器人本身内部构造复杂密集,极易受到潮湿环境的影响。

hypertunnel机器人内构
■ 如何精确定位
hypertunnel工法对于机器人钻孔的定位要求极高,由于在实际运用中会有上千台机器人同时运作,因此这一过程很难利用人工进行辅助。要实现这一目标,每台机器人都需要有非常精确的位置感知和姿态感知能力,还需要一套钻孔位置检查系统,以及出现偏差后的补救方案。

定位测试中的hypertunnel机器人
此次展示中,hypertunnel还收到了一系列关于注浆材料,勘探设备,控制软件等技术细节相关的质疑和提问。面对诸多提问和质疑,hypertunnel公司表示会引进更多相关领域的专业人士,寻找更多创新性威尼斯人2299的解决方案。
设计中的可视化控制界面
结 语
尽管受到了不少质疑,但hypertunnel的应用已经初见曙光:英国铁路已经与hypertunnel签订了协议,准备利用该技术在不中断隧道运营的情况下,翻新一部分维多利亚时代的老隧道。此外,一些施工单位也准备尝试使用该技术来建设联络通道。hypertunnel的具体效果如何,是否能够达到地下工程的使用要求,让我们一起期待!
内容整理自网络